
El rotor informa al controlador mediante una tensión, que depende de la posición en que este. El arduino soporta un máximo de 5V, por ello alimentamos al potenciometro de control, con esa tensión.
Para tener mayor precisión, se puede alimentar con la salida AREF.
El controlador, por la señales de alterna que se inducen en el cable de conexión del rotor, tiende a resetearse.
La primera solución, es poner un filtro en las entradas analógicas, este filtro compuesto por un condensador conectado a masa y una resistencia, debe eliminar dichas interferencias.
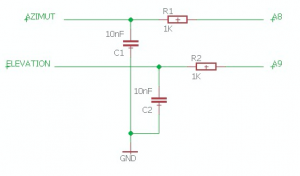
Esquema entrada señal
En el esquema se muestra el conexionado. Esta preparado para controladores que tengan la posibilidad de controlar un rotor de elevación.
La asignación del pin lo haremos en rototator.pines.h
El azimut lo definiremos en: (en nuestro caso utilizaremos el pin analógico A8)
#define rotator_analog_az A8
La elevación lo definiremos en: (en nuestro caso utilizaremos el pin analógico A9)
#define rotator_analog_el A9